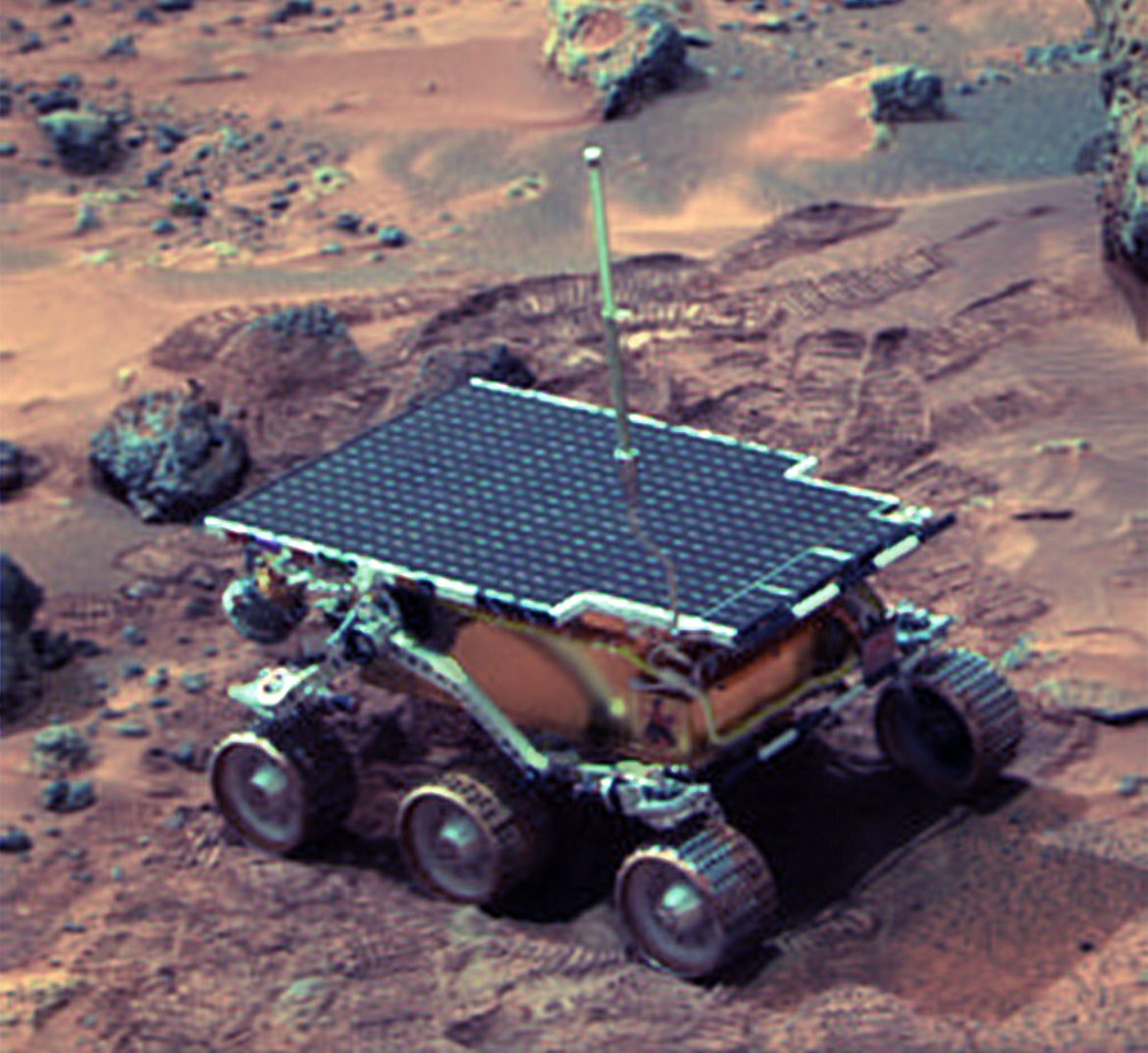
Sojourner-roveren var en lille, autonom robot, der blev sendt til Mars som en del af NASA’s Mars Pathfinder-mission i 1997. “Sojourner” betyder “rejsende” på engelsk, og navnet blev valgt for at afspejle roverens rolle med at udforske Mars’ overflade.
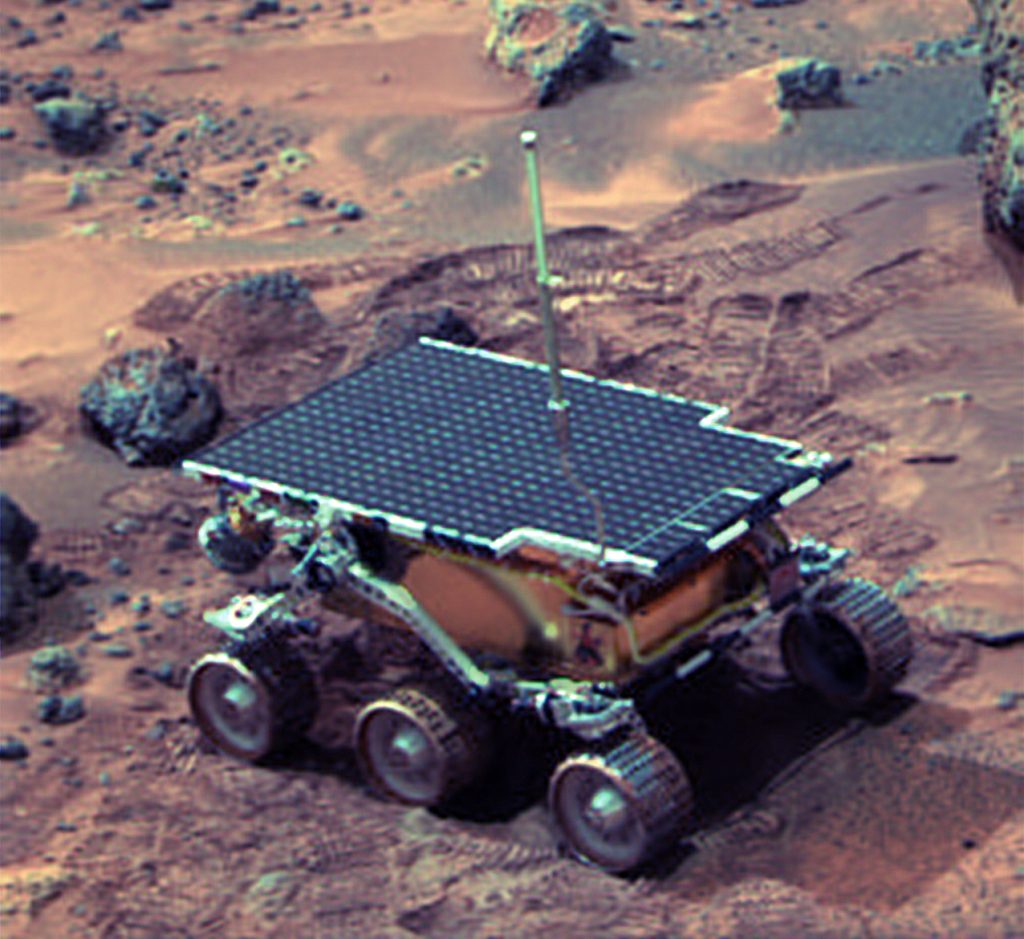
Sojourner-roveren blev designet til at udføre en række opgaver på Mars’ overflade og indsamle data om planetens geologi, atmosfære og klima. Den blev drevet af solpaneler og havde seks hjul, der gjorde det muligt for den at bevæge sig rundt på overfladen.
Roveren var relativt lille og vejede kun omkring 10,5 kg. Den var cirka 65 cm lang, 48 cm bred og 30 cm høj. På trods af sin lille størrelse var Sojourner udstyret med forskellige instrumenter, herunder stereokameraer, der tog billeder af Mars’ overflade og hjalp med at identificere interessante områder for videnskabelig undersøgelse.
Sojourner-roveren havde også et Alpha Proton X-ray Spectrometer (APXS), der kunne analysere sammensætningen af sten og jordprøver. Den havde også et termisk eksperiment, der kunne måle temperaturen på Mars’ overflade, samt instrumenter til at studere Mars’ atmosfære og vejrforhold.
Roveren blev styret fra Jorden ved hjælp af et kommunikationssystem, der sendte instruktioner til den og modtog data og billeder tilbage. Den blev også udstyret med et lasersystem kaldet “Alpha-Particle X-ray Spectrometer (APXS)”, som blev brugt til at analysere sten og jordprøver på Mars’ overflade.
Sojourner-roverens mission var en stor succes, og den fortsatte med at udføre videnskabelige undersøgelser og sende data tilbage til Jorden i omkring tre måneder, indtil kommunikationen med roveren blev afbrudt den 27. september 1997.
Sojourner-roveren var en banebrydende mission, der markerede den første gang, en mobil robot udforskede overfladen af en anden planet. Den bidrog væsentligt til vores viden om Mars og banede vejen for senere Mars-rovere som Spirit, Opportunity og Curiosity.